计算机体系结构课程笔记
复杂流水线和乱序执行
静态调度流水线
完全依赖编译器执行指令调度,一旦有指令因为资源冲突或数据依赖而停顿,则后续指令都不允许发射
动态调度流水线
允许就绪指令越过前面停顿指令先发射
所有动态调度流水线ID阶段拆分,差别在如何管理已发射、未就绪指令:
- Issue: 对应之前的ID但减少操作,只做:指令译码、资源冲突检测
- Read operands:等待数据冲突结束,读取操作数
- 非就绪指令停顿在这一阶段,就绪指令由此阶段发射
计分板算法
参考知乎文章
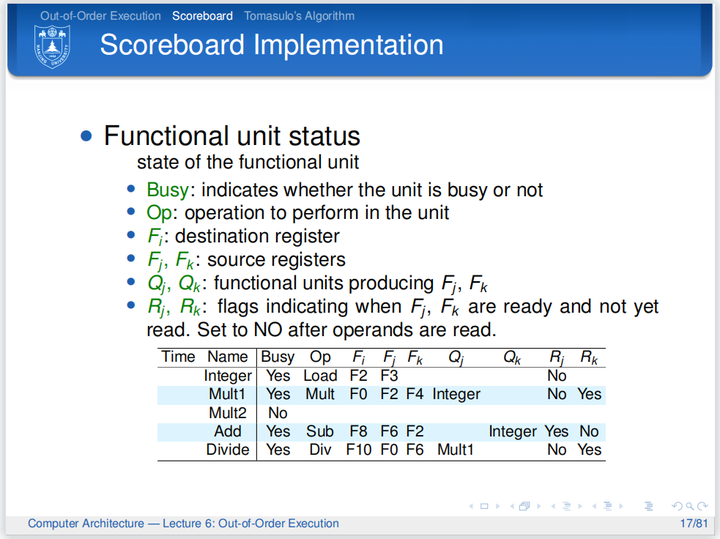
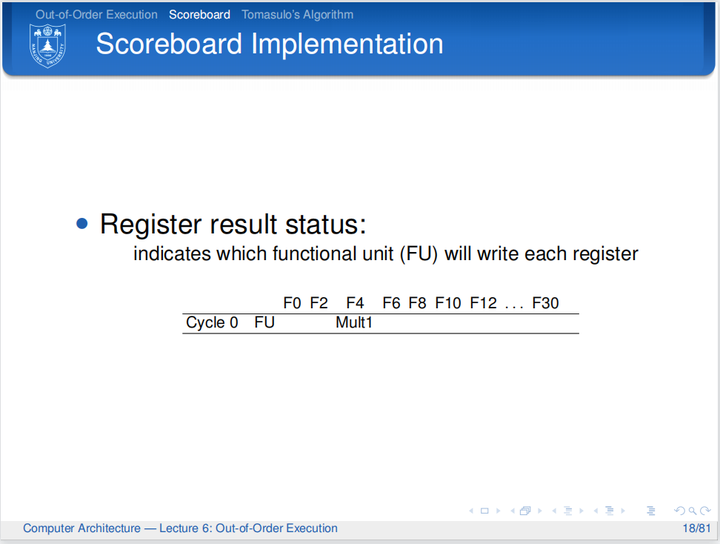
计分板数据结构:
流程:
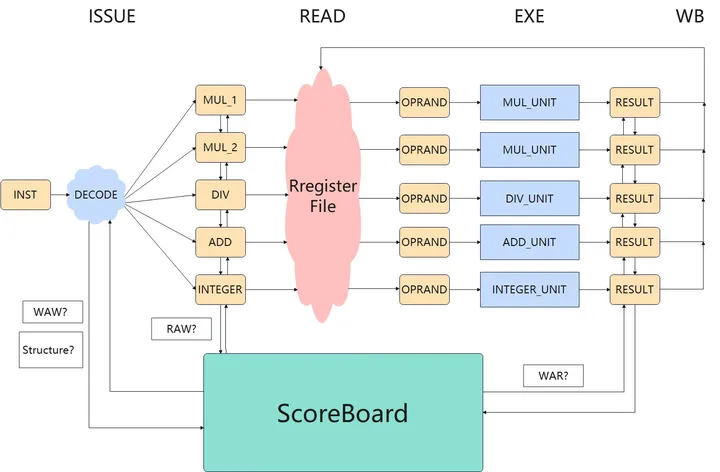
黄色表示流水段寄存器,指令寄存器(inst)、部件寄存器、操作数寄存器、结果寄存器
执行流程示意图:
相同部件被占用则指令不能Issue,在唯一的INST寄存器中阻塞,后续指令也不能进入INST寄存器
缺点:因为WAR和WAW冒险而产生阻塞
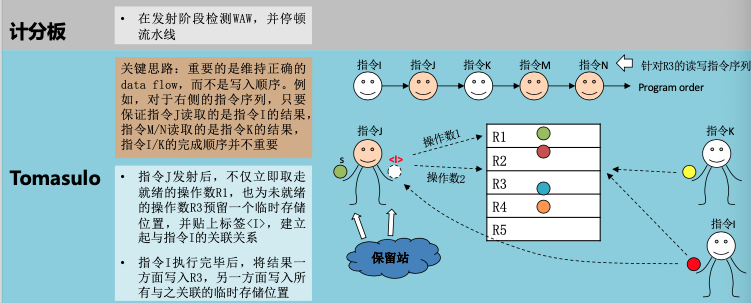
Tomasulo算法
核心:寄存器重命名,可彻底消除WAR/WAW冲突
- 需要在值生产者与消费者之间建立通信
- 寄存器重命名:给每个值一个tag
- 给指令提供缓冲区:每个部件一个保留站
- 持续监测值是否可用:准备好则广播tag,消费者匹配tag
- 指令所需全部值准备好则发射
保留站结构:
- busy: 功能部件是否被占用
- op: 具体操作
- vj, vk: 保留源操作数值
- qj, qk: 产生源操作数vj, vk的保留站编号,0表示源操作数已经在vj, vk
- a:为load/store存放address
重命名映射表
| Register | Tag | Value | Valid |
|---|---|---|---|
| R0 | 1 |
WAR消除:
- 计分板:
- 指令i还有一个操作数(R3)未就绪时不会读取已就绪操作数(R1)
- 指令j想要写入R1是必须等待i将R1取走
- Tomasulo:
- 指令i直接将就绪的操作数R1取走,并保存在一个临时存储位置(S)
- 指令j可直接写R1
- 指令i执行时使用S而非R1,重命名
WAW消除:
架构:
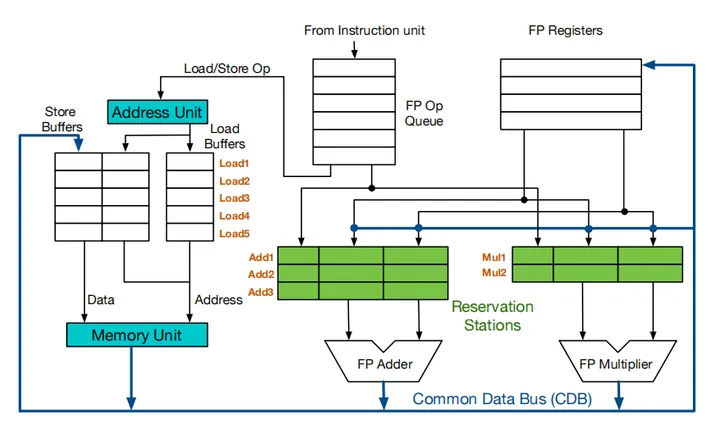
load缓冲区功能:
- 保存有效地址的各个部分,直到计算完成
- 跟踪在存储器中等待的未完成载入过程
- 保存正在等待CDB的已完成载入过程的结果
store缓冲区功能:
- 保存有效地址的各个部分,直到计算完成
- 对于尚未完成,正在等待的存储过程,存储目标寄存器地址
- 保存要存储的地址和数据值,直到存储单元可用
load/store指令分两步:
- 在基址寄存器可用时计算有效地址,放入缓冲区,通过地址来避免冒险
- load在存储器单元可用时立即执行
- store等待待存储的值,发送给存储器单元
调度流程:
- 发射:顺序发射到保留站,判断能否发射的唯一标准是指令对应通路的保留站是否空闲,若指令又可以读取的数据则拷贝到保留站中,后续指令目的寄存器和前序指令重合,则只保留后续指令的写信息。
- 执行:指令通过拷贝数据/监听CDB获得源数据,执行
- 写回:指令在写回阶段通过CDB总线将数据送到寄存器堆和保留站;根据寄存器结果状态表更新寄存器堆
每个执行部件配有一个保留站
ld/sd Issue后计算存储地址占一个周期
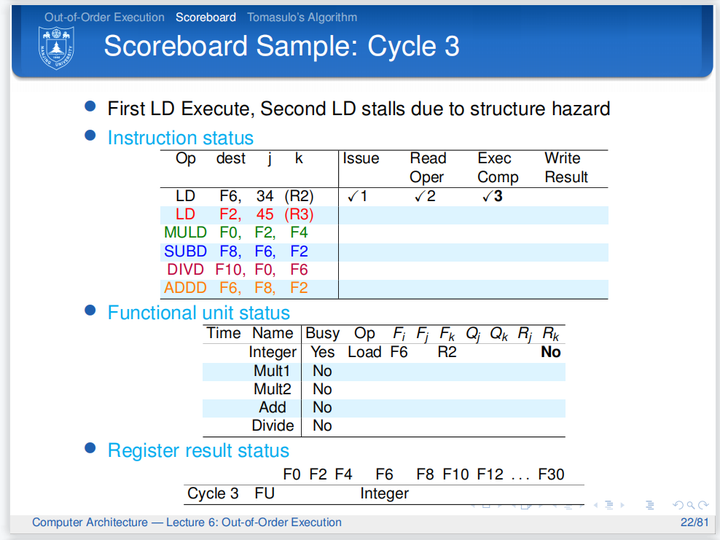
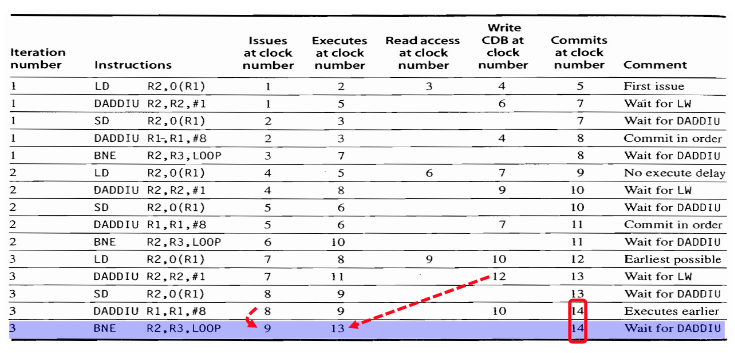
例子:
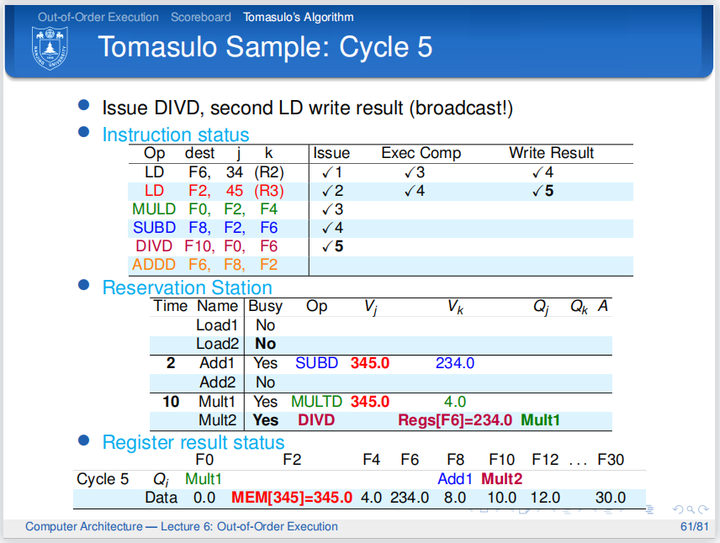
注意到第四拍第二条ld指令并没有Execute,这是因为对load/store指令而言,内存地址的相关性并没有寄存器数据相关这么直接,需要检测内存地址的相关性,因此只有当指令在队列头才能够执行
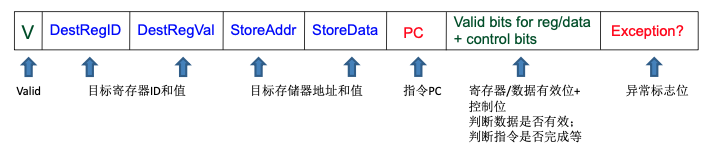
无法实现精确中断,需要加入重排序缓冲,提交阶段应该按照顺序
ROB为循环队列,表项:
流水线性能
$$CPUTime = InstructionCount \times CPI \times Cycle Time$$
分支预测
from before的指令插入延迟槽是说原先的指令延迟执行,因此不会浪费任何timing
超标量
双发射、超标量处理器的执行示例:
写CDB下一拍依赖指令可获取值,不需要写寄存器的指令直接commit
Memory
参考youtube视频,非常推荐观看,动画讲解当前技术,通透
Memory Array: Address N位,可存储M位Data
DRAM读写17ns,刷新每行50ns/全部3ms,64ms电容全部漏电,SSD读写50ms
DDR每个时钟周期发送2批64位事务,每秒处理48亿次请求,每秒刷新16次
现代主板上通常支持双通道Channel内存,对应A1, A2, B1, B2四个插槽,Ai为一个通道,Bi为一个通道,为了利用两个通道需要同时各插入一个内存条
DDR顶端芯片是电源管理芯片
通道在主板上的区分并不明显,很可能只是延伸出去的两种线
DDR5结构和数据:
- 每个Channel也被区分为Channel A/B,分别为上下两半,独立使用32条线传输32位数据,中间有21条线传输地址,32条线之间有7条线传输控制信号
- 每个Chip读写8位数据,每个Chip有2GB DRAM Die
- Die纵向划分为8个Bank Groups
- 每个Bank Group 4个Banks,Die上一共32个Banks,bank group可以刷新一次一行但是其他三行可以继续用
- 每个Bank有$65536\times 8192$个cells,bank之间独立可并行
- 每个Bank Group 4个Banks,Die上一共32个Banks,bank group可以刷新一次一行但是其他三行可以继续用
- Die纵向划分为8个Bank Groups
- 每个Chip读写8位数据,每个Chip有2GB DRAM Die
寻址:31位地址,21位[RAS]行地址选通,10位[CAS]列地址选通,3位Bank Group,2位Bank,16位Row,10位Col
读写时bit line会预充电半高电压(不同代DDR最高电压不同,DDR5最高电压1.1V),而后经过读写放大器识别电压的微小改变而放大电压变化
- Channel(处理器一侧一个Channel),如果为消费级主板,则为12/34两个channel,12插槽为1个channel
- DIMM(一个卡槽slot一个DIMM)(Dual Inline Memory Module)
- Rank(一面一个Rank),64位
- Chip(一面8个Chip),8位
- Bank Group(一个Chip8个Bank Group)
- Row/Colomn
- Bank Group(一个Chip8个Bank Group)
- Chip(一面8个Chip),8位
- Rank(一面一个Rank),64位
- DIMM(一个卡槽slot一个DIMM)(Dual Inline Memory Module)
读过程:
- Row Close
- Precharge Bitlines
- Row Open
- Column Address
- Access 1T1C Cells
加速:
- 命中同一行时可以省略上面1~3步
- 每个Bank使用Burst Buffer,将128位数据存成$16\times 8$的阵列,使用列选通10位中的6位选中128位的数据作为prefetch,预取到Burst Buffer中,而后用4位来索引特定列的数据
- 字线和位线和晶体管相比太长,Memory Array下再插入一层subarray($1024\times 1024$ Cells),每个subarray下面有读写放大器。好处:
- 电容可以变小
- 行选通时间变短
- Folded Layout:$字线数量\times 2$,将一侧的晶体管一半移到另一侧,隔行移动,读写放大器中有反相器和precharge晶体管,precharge阶段反相器关闭,precharge将两个字线充电至半电压
Cache
核心机制:用index索引set,用tag在set内遍历寻找cache line,用offset取到实际的数据
计算
结构计算:$sets$ - 纵向组,$ways$横向组内的路数
$$Data\ Array\ Size(Cache\ Size) = sets \times ways \times blocksize$$
$$Tag\ Array\ Size = sets \times ways \times tagsize$$
$$index\ bits = \log_{2}(sets)$$
$$offset\ bits = \log_{2}(blocksize)$$
$$address\ width = tag\ bits + index\ bits + offset\ bits$$
延迟计算:设第$i$层Cache固有访问时间$t_{i}$,感知访问时间$T_{i}$,命中率$h_{i}$,缺失率$m_{i}$
则$T_{i} = t_{i} + m_{i}\times T_{i+1} + \cdots + m_{N - 1}\times T_{N}$
Cache写,写回/写直达/写失效:要写的数据不在cache中,
- 写不分配:将要写的内容直接写回memory
- 写分配:将要写的地址所在的块先从memory调入cache,然后写cache
Cache性能
相联度越大,Way/Set越大,预取数据越多,因此miss rate越小,hit latency和area cost越高
cache miss类型:
- Compulsory miss: 第一次总是miss
- Capacity miss
- Conflict miss
一致性
Valid/Invalid协议
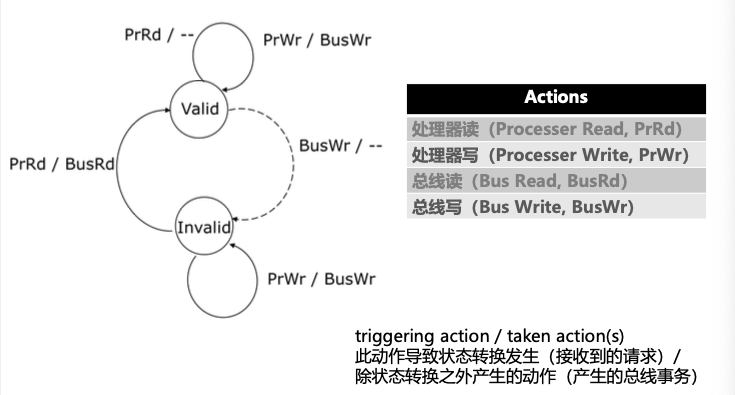
总线写将导致Valid$\rightarrow$Invalid,此时读将导致从内存更新,因此Invalid$\rightarrow$Valid
一致性协议
- 写作废策略:一个处理器写之前保证它对该数据项有唯一的访问权,更新之后使得其他备份作废无效
- 减少数据传输的带宽
- 写更新策略:一个处理器更新时将更新的内容传播给拥有备份的处理器
- 减少读操作的延迟
下面两种协议是描述协议底层实现的,根据机器的不同实现不同
Snoopy Protocol监听协议
- 通过广播维护一致性
- 适用于多个处理器通过总线相连的集中式共享存储系统
可扩展性有限
Directory Protocol目录协议
- 为每一存储行维持一个目录项,记录所有当前持有此存储行备份的处理器ID以及此行是否已经被改写等信息
- 适用于分布式共享存储系统
- 因为是分布式共享存储,因此目录的存储仍然是在每个节点上,通过网络互联来保证数据的一致性(必然仍然有广播的过程)
- 条目可表示成bit位图,前N个bits代表拥有该条目的处理器Cache,最后一个bits代表是否处于独占
MSI/MESI这种协议只是对于Cache状态的描述,并不涉及底层实现,不能说MSI就是监听/目录协议,而是两者都可,取决于硬件要求
MSI
监听协议
状态转移图:
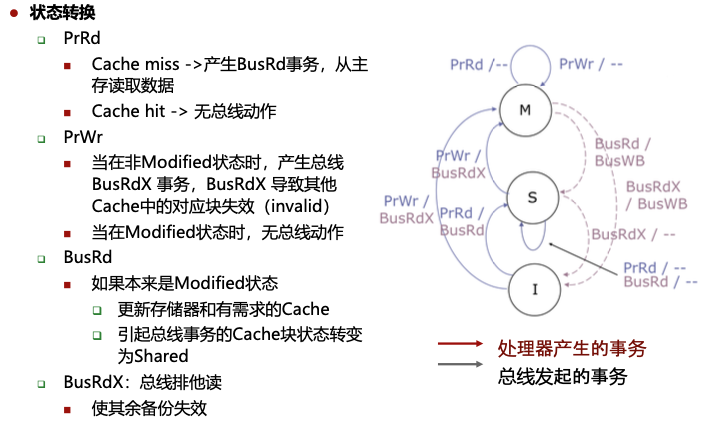
和目录协议区别:事务由处理器产生或由总线发起,响应只可能是总线事务,因为M态修改了条目,因此其他处理器的任何读请求都将写回主存(产生BusWB事务)并降级
目录协议
Cache状态:
- Modified(M)
- Shared(S)
- Invalid(I)
目录状态:
- Uncached(Un):所有处理器核心都没有数据副本,I
- Shared(Sh):一个或多个处理器拥有读权限,对应S
- Exclusive(Ex):只有一个处理器有读写权限,M
Cache States:
| 条目 | 状态机 |
|---|---|
| 由于处理器访问 所有写请求都转移至M态,发独占请求,I的读到S,发共享请求,其余读状态不变 | 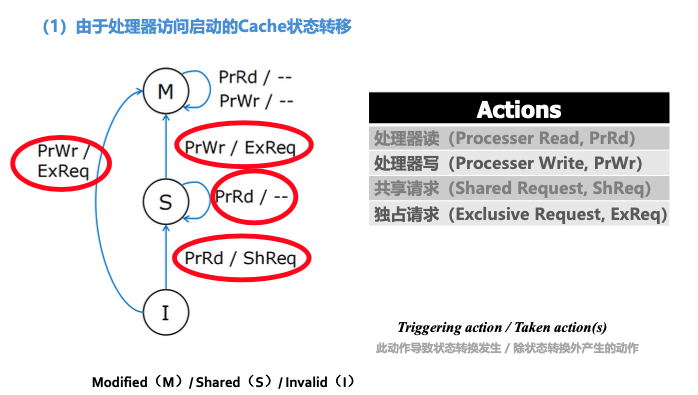 |
| 由于目录请求 降级请求M$\rightarrow$S,所有Invalid请求都到I,请求响应相对应 |  |
| 由于数据置换 写回请求都转到I | 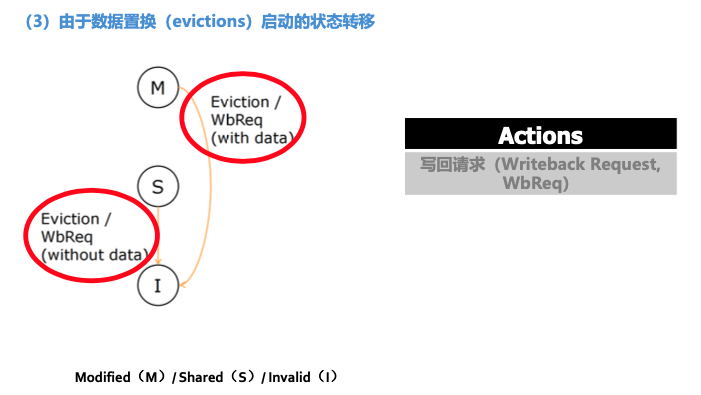 |
| 总 | 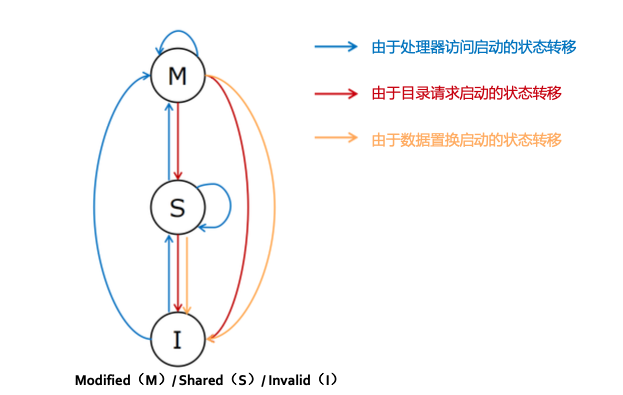 |
Directory States:
| 条目 | 状态机 |
|---|---|
| 由于数据请求 所有共享请求ShReq都转到Sh,所有独占请求ExReq都转到Ex,无跳转到Un | 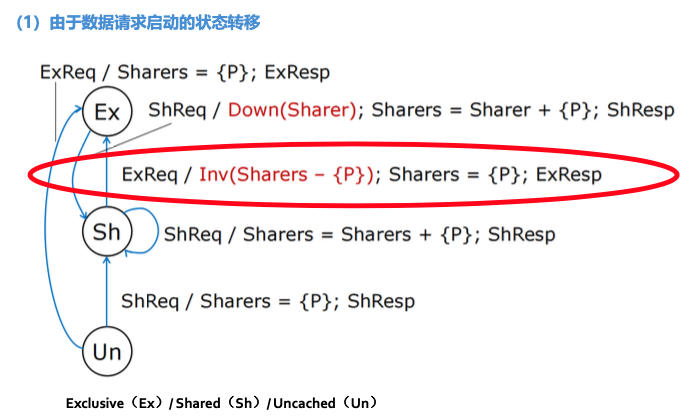 |
| 由于写回 写回请求除了当共享者多于1个都转到Un,否则留在Sh | 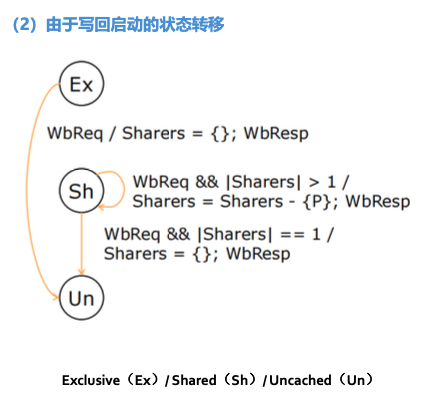 |
| 总 | 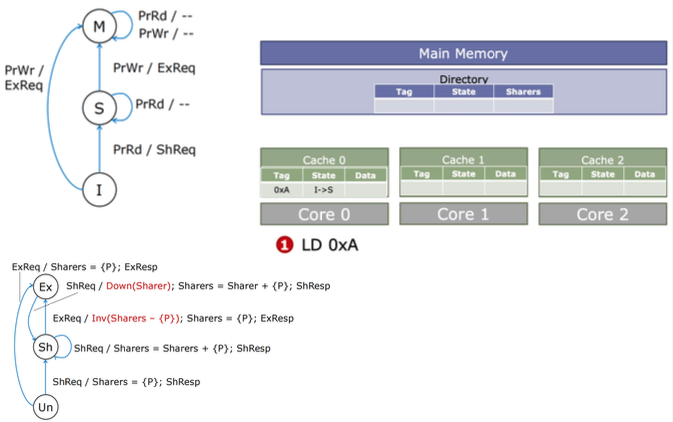 |
MESI
监听协议
状态转移图:
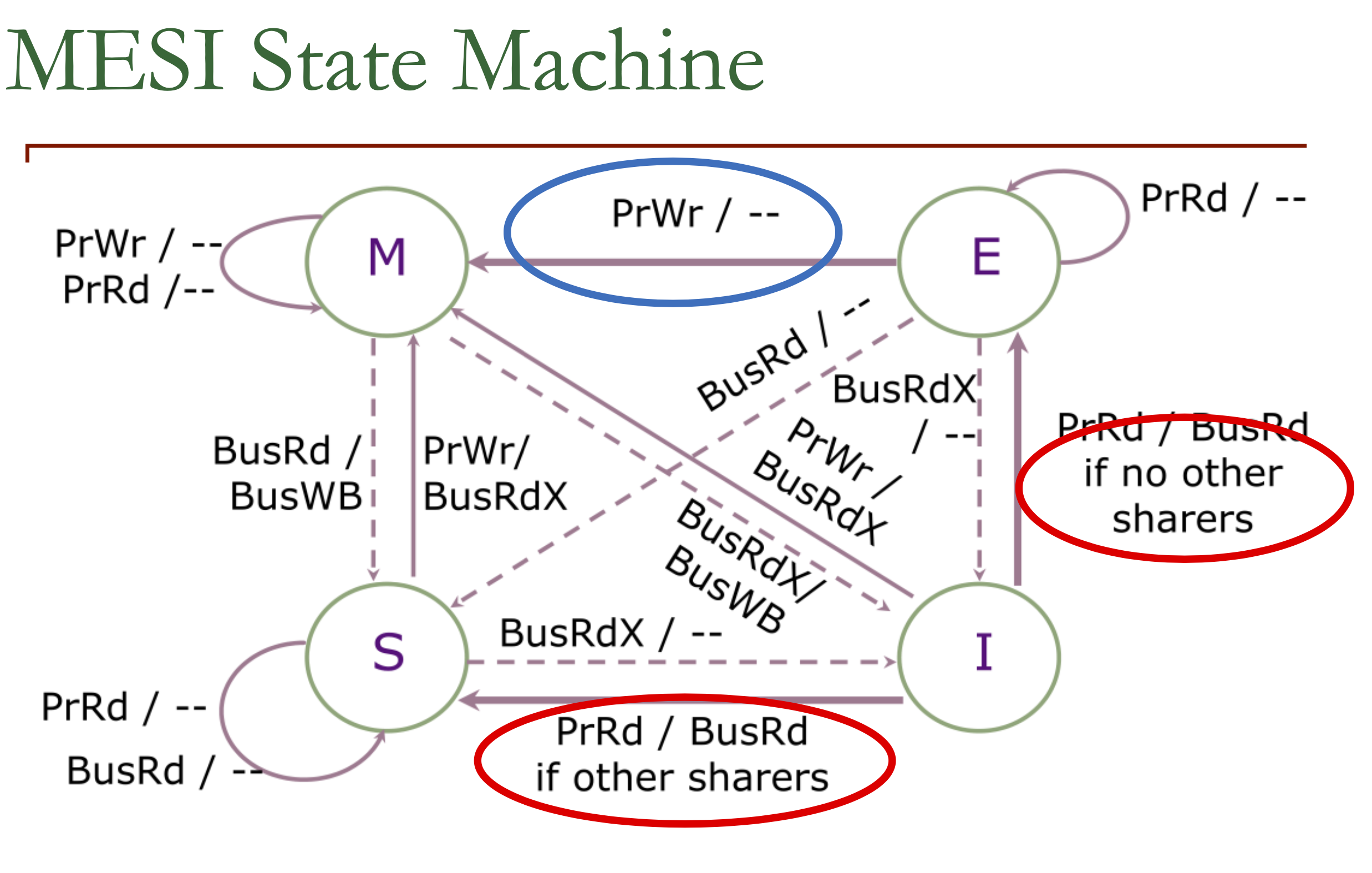
只有当PrRd通过BusRd发现没有其他人持有的时候才进入Exclusive State
杂项
Cache假共享:不同处理器需要同一Cache line的不同数据,会导致频繁的独占请求和写回(乒乓效应),Cache line实际上没有共享
虚存
替换算法
Clock
利用R(Reference)/A(Accessed)位判断是否已经使用了页面,需要替换时,顺时针方向遍历环形链表,替换为设置R/A位的第一个frame
虚存与缓存
Translation Look-aside Buffer (TLB)
在L1缓存前进行地址翻译还是之后,即缓存使用虚址还是物理地址
同一个虚址可能对应不同的物理地址,不同的虚址可能映射到同一个物理地址
必须让缓存使用一部分page offset作为index,使用TLB翻译后的物理页框作为tag来索引(虚实一致)
Virtually-indexed Physically-tagged缓存大小限制为$页面大小\times 关联度$
指令级并行和多线程
并行种类:
- 指令级并行
- 定义:单处理器拥有同时执行多条指令的能力
- 实现方式:一个时钟周期执行多个指令的部分
- 数据级并行
- 定义:同时处理多个数据元素的能力
- 实现方式:Vector, SIMD
- 线程级并行
- 定义:任务被组织成多个线程
- 实现方式:多核处理器、多处理器、超线程技术
指令级并行
前递是前递到对应级别输送到下一级的通路上,实现时前递使用组合逻辑,需要前递时自动将数据填充到流向下一级的data bus中
$CPI<1$,多发射处理器
- SuperScalar超标量
- 特点:具有多个执行单元,能够在同一时钟周期内发射和执行多条指令
- 通用计算最成功的方法
- VLIW超长指令字
- 特点:每个周期流出指令数是固定的
线程级并行
保证一条流水线上的指令之间不存在数据依赖关系:在相同流水线中交叉执行来自不同线程的指令,需要传递线程选择信号
多线程开销:
- 每个线程有自己的用户态
- PC
- GPRs
- 每个线程需要有自己的系统态信息
- 虚存页表基址寄存器
- 异常处理寄存器,其他系统态
- 其他开销
- 线程冲突导致Cache/TLB冲突
- OS调度开销
线程调度策略:
固定交叉模式
- N个线程,每个线程隔N个周期执行一条指令,若未就绪则插入bubble
- 消除旁路和互锁
软件控制
- OS为N个线程分配流水线S个时隙(根据Priority差异)
- 硬件针对S个时隙采用固定交叉模式
硬件控制
- 硬件跟踪可调度线程,根据优先级自动选择线程执行
细粒度多线程(FGMT):每个周期在线程之间进行上下文切换,线程能够连续执行
粗粒度多线程:相隔周期数多
同步多线程(Simultaneous Multithreading):相同时钟周期内运行多个线程指令,Intel超线程是SMT-2,一个物理核虚拟出两个逻辑核
SMT参考知乎文章
总体思想:将一个串行任务拆分成多个互不相关的组,组内指令必须按序执行,依靠超线程技术允许同时执行各组指令
乱序超标量,增加多上下文切换及取指引擎可以从多个线程取指令,可同时发射
- 私有/共享:指令Cache,分支预测器
- 私有:重命名保留站,ROB
- 共享:执行引擎,寄存器,数据Cache等
SIMD & GPU
SIMD
- Array Processor
- Vector Processor
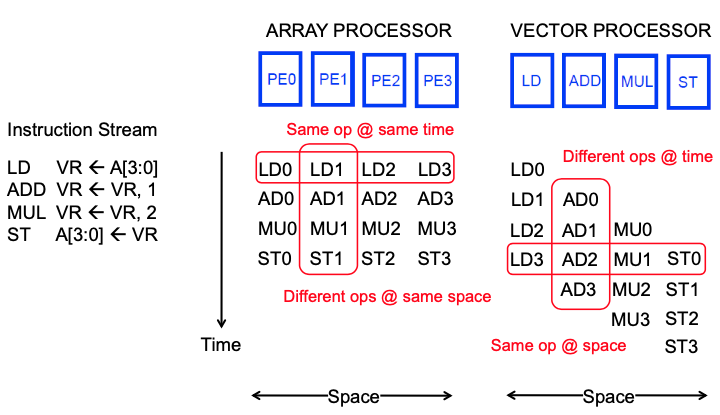
区别:前者每个处理部件都需要有完整的功能、所有功能并行,而后者每个处理部件对应特定功能、不同功能之间并行,Array能够完全并行,Vector仅能够流水处理相同指令
lane:包含向量寄存器堆的一部分和来自每个向量功能单元的一个执行流水线,即一个部件,数量决定warp内的并行度
GPU
SIMT - single instruction, multiple thread
费米架构:
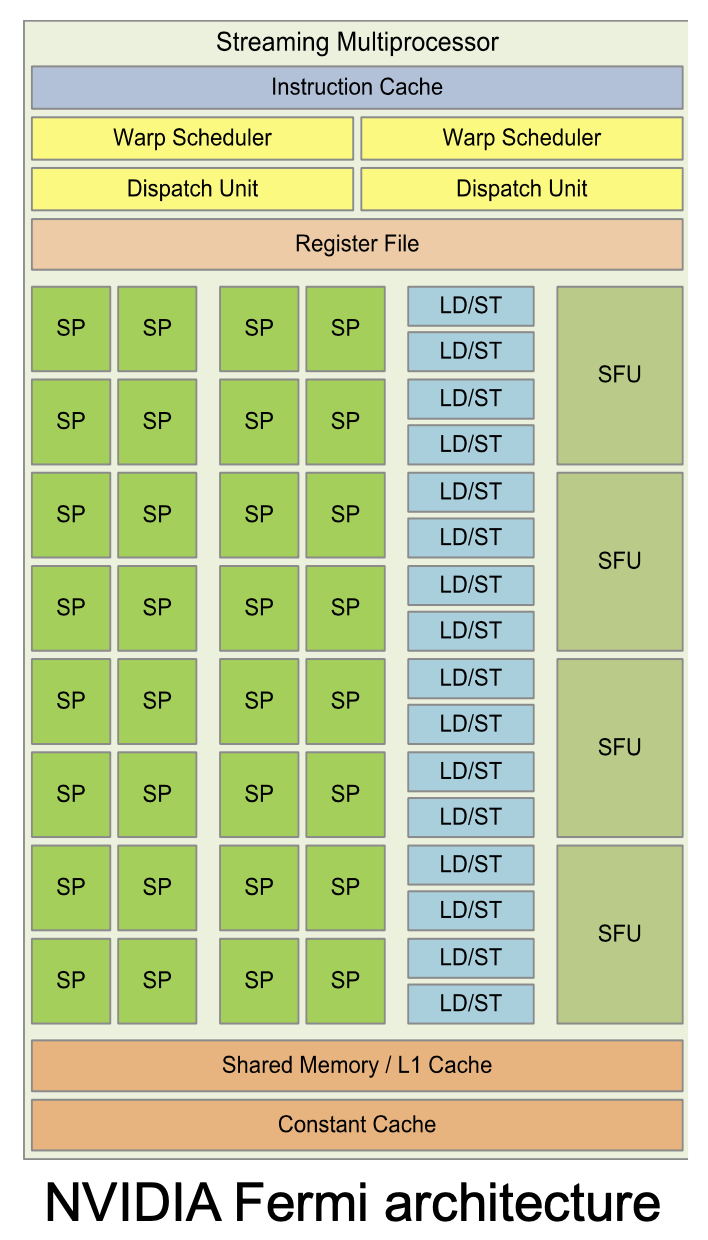
硬件上看:
- Streaming Multiprocessor(SM) - Streaming Processor(SP)
执行级别概念:
- large data-parallel operation
- thread blocks(1 per SM)
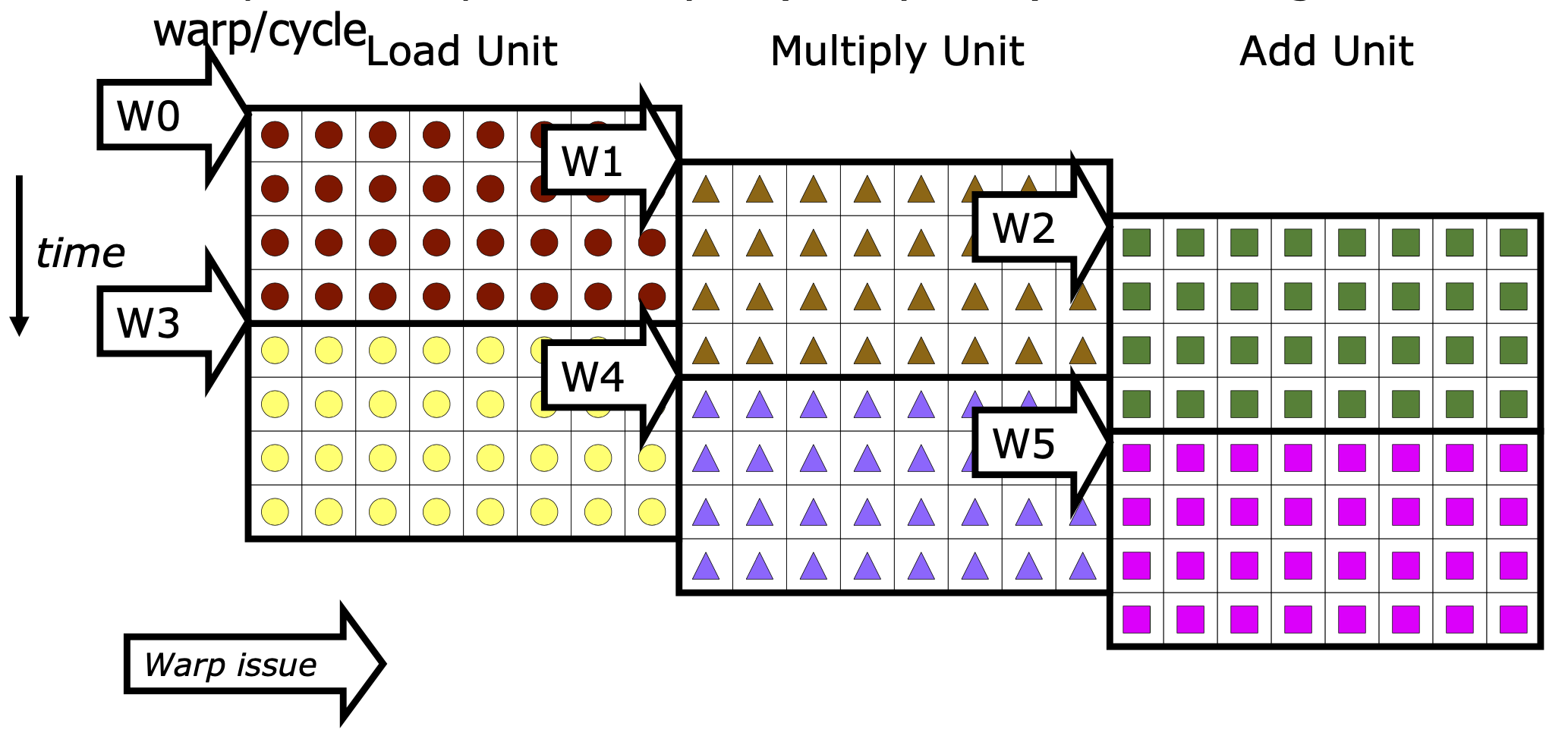
- warps:包含固定数量线程的最小执行单位,所有线程执行SIMT模式,即所有线程执行同样的指令,操作不同的数据;thread blocks分配给SM后,会被划分为多个warps,在SM上并行执行(可同时执行不同的Function Units),每个block中warp数量为$WarpsPerBlock=\lceil\frac{ThreadsPerBlock}{WarpSize}\rceil$;一个Warp中的线程必然在同一个Block中,若threads凑不满一个Warp,将浪费SM资源
- thread blocks(1 per SM)
SIMT是SIMD的一种实现方式,两种编程上有不同:
- SIMD每条指令指明不同的数据输入
- SIMT线程自动在warp中执行
SPMD编程模型:处理器执行同样程序但可以对不同数据进行操作。软件层面看:
- Grid(对应device):许多线程块组成Grid,一个kernel并行任务会形成一个Grid
- Block(对应SM):许多线程组成Block
- Tread(对应CUDA Core,即SP)
- Block(对应SM):许多线程组成Block
GPU核数量对程序员透明
传统SIMD与Warp-based SIMD区别:
- 传统SIMD包含单线程,按序锁步执行,以SIMD为编程模型,需要指明向量宽度,指令级中含有向量操作指令
- Warp-based SIMD包含多个标量线程,每个线程以SIMD方式运行,不一定锁步,每个线程在不同warp内独立,编程模型不同,无需传递位宽信息,动态线程组给予多线程灵活性,使用标量ISA
需要让warp做的有用功尽可能多,将正交的warp进行merge
Interconnect
- Network interface:将终端(处理器)接入网络
- Link:载有信号的连线
- Switch/Router:将一些输入通道与一些输出通道相连
- Channel:在router之间的逻辑连接
- Note: Switch/Router
- Message: 向终端传递的单元
- Packet:网络传输单元
- Flit:控制位信号
考虑网络中不同节点的连通性
需要deadlock free,考虑不同包同时到达同一switch该怎么做
流控(flow control)
- 电路开关
- bufferless (packet/flit)
- store and forward (packet)
- virtual cut through (packet)
- wormhole (flit)